Projects
A showcase of my technical projects and implementations

Motion Planning in City Traffic using CARLA
Implemented finite state machine based behavioral planning and conformal lattice planning for autonomous vehicle navigation in complex city traffic scenarios using CARLA simulator.
Nonlinear MPCC for Autonomous Racing
Developed nonlinear Model Predictive Contouring Control (MPCC) for high-speed autonomous racing using both kinematic and dynamic vehicle models on F1/10 racing cars.
RRT* Motion Planner with Minimum Jerk for Quadrotor
Implemented RRT* sampling-based motion planner with minimum jerk trajectory optimization for quadrotor navigation in 3D environments.
Graph Search-Based Motion Planners
Comprehensive implementation of various graph search algorithms including A*, Dijkstra's, Weighted-A*, BFS, DFS, D* Lite, and M* multi-robot planning.
Sampling-Based Motion Planners
Implementation of various sampling-based planning algorithms including RRT, RRT*, PRM, FMT*, Informed RRT*, and BIT* for high-dimensional motion planning.
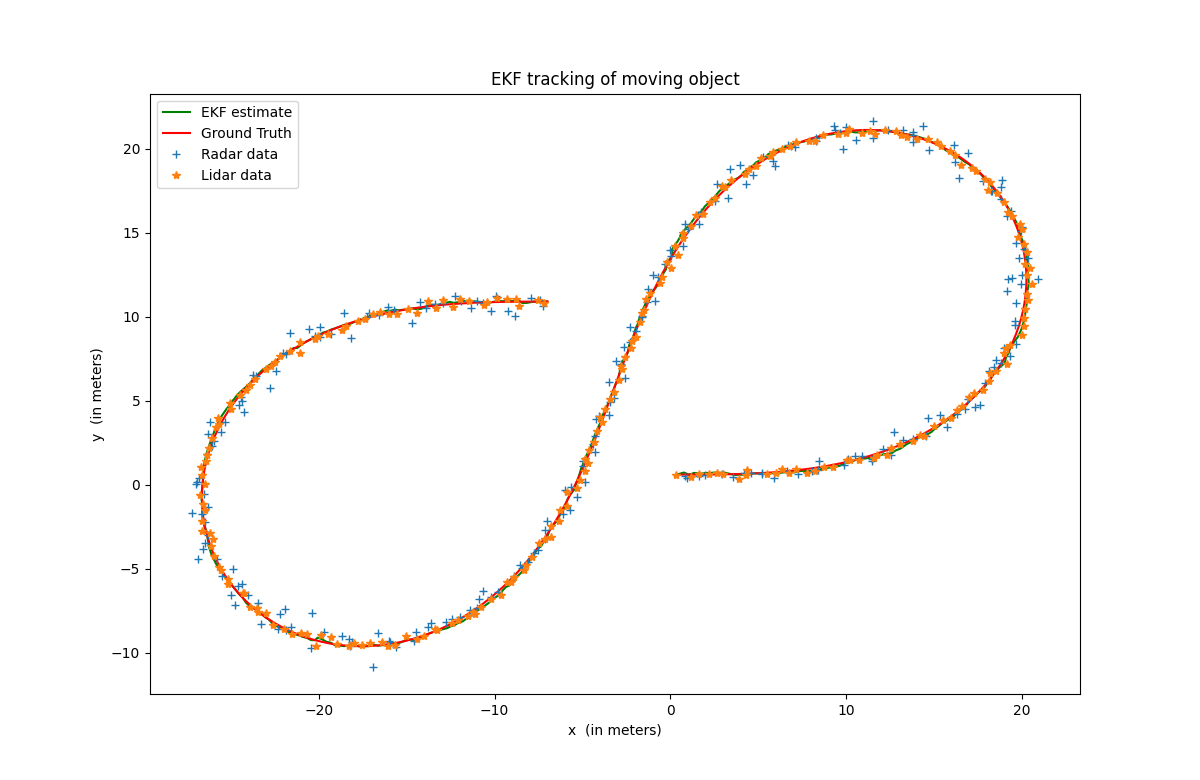
State Estimation and Tracking
Comprehensive implementation of state estimation algorithms including Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) for tracking moving objects.